Accessibility constraint mapping
Off-road navigation often involves difficult-to-traverse terrain or barriers, such as stairs, sidewalk curbs, construction sites, uneven pavement, etc. Global navigation planning provided by traditional mapping software (e.g. Google maps, Waze) does not typically account for such constraints, and may not be able to plan for unforeseen constraints that vary on a day-to-day basis such as temporary obstacles or path deteriorations. This project seeks to optimize path planning in light of variable off-road navigation constraints by building navigation maps in real-time using simultaneous localization and mapping (SLAM) software. Potential end-users of off-road navigation maps include autonomous rovers and handicapped persons.
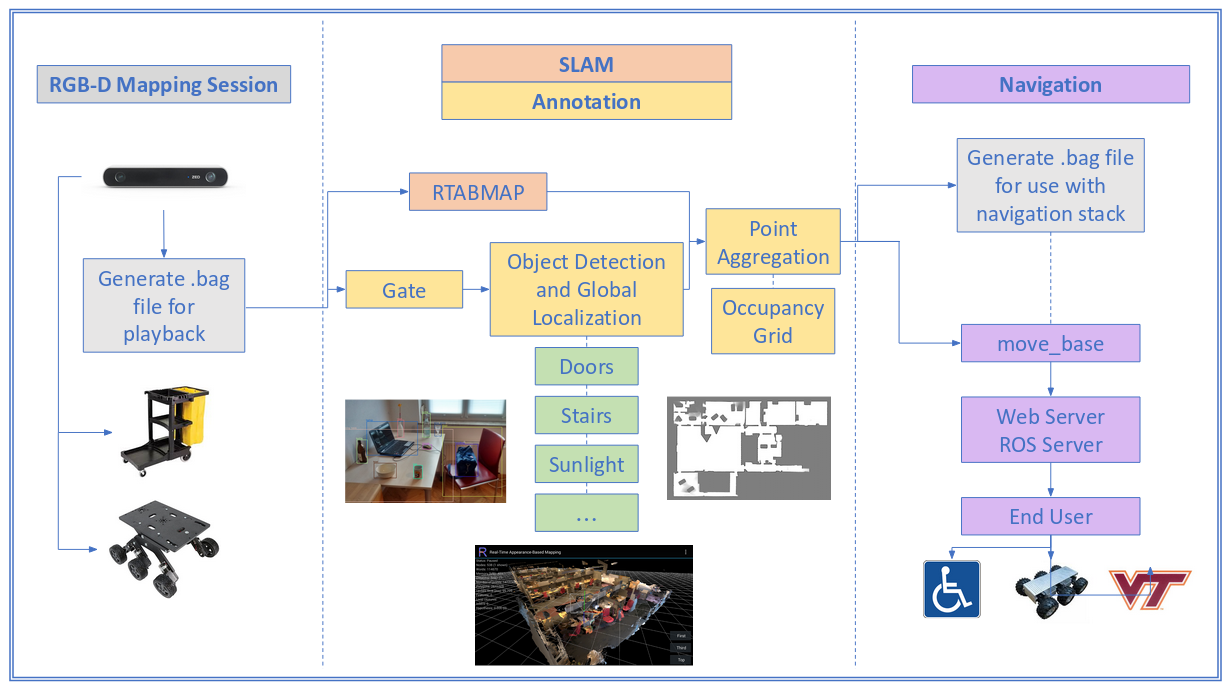
Fig 1. Overview of the accessibility constraint mapping framework.