Predictive Hall thruster modeling
Hall thrusters are a form of in-space electric propulsion in which a plasma discharge is maintained using crossed electric and magnetic (i.e. \(\mathbf{E}\times \mathbf{B}\)) fields. Hall thrusters have exploded in popularity in recent years due to their high efficiency and low cost. One of the primary challenges in Hall thruster development is accurately modeling the discharge plasma, especially with respect to the poorly understood physics of electron transport and the coupling of the thruster to its testing environment. These and other related issues introduce large uncertainties to model predictions and prevent the applicability of ground-test data to in-space operation. The ongoing work of the JANUS institute is to develop a predictive model of the Hall thruster operating in a vacuum chamber and to reliably make confidence-bounded estimates of in-space performance.

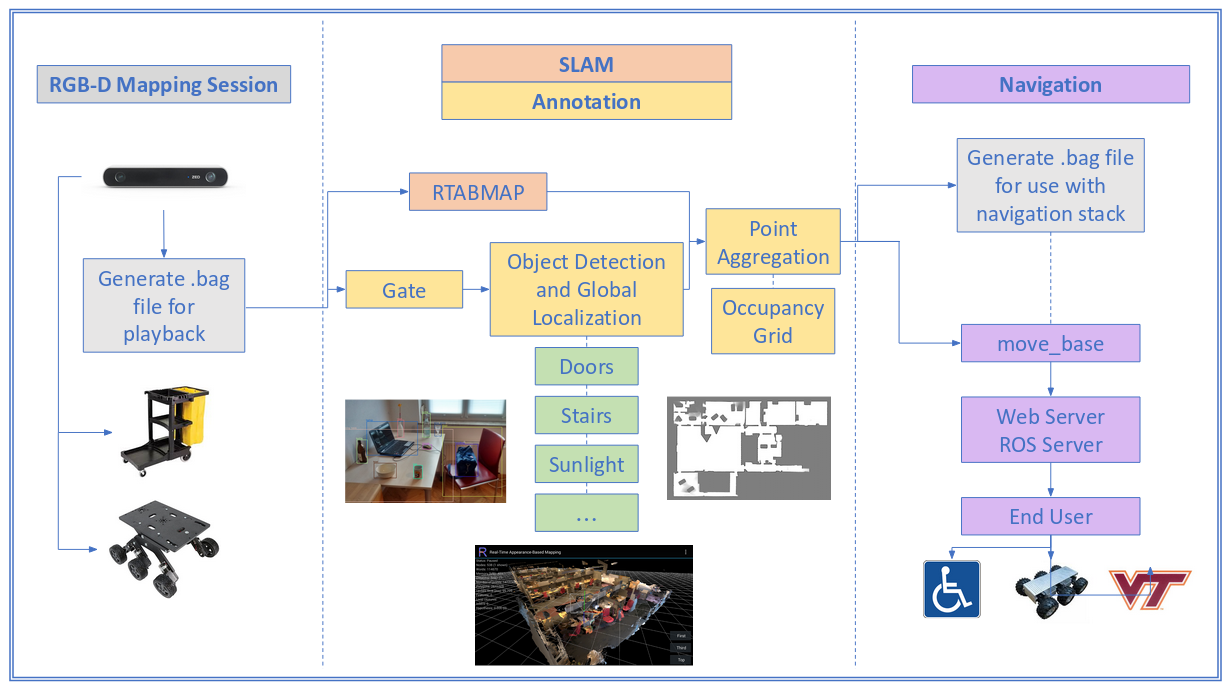
Fig 1. The predictive Hall thruster modeling framework (Eckels et al. 2024).

 Bubble Bobble
Bubble Bobble